Single-colony robot costs too much (>2000 EUR) to be cost-efficient in large scales. Because of this, it is unlikely that 👨🏻🚒Industrial beekeepers or 🧑🏻🌾Farmers (that have >20 beehives) will buy it. Instead, we are targeting people that value exterior 🔪Design to compliment their brand.
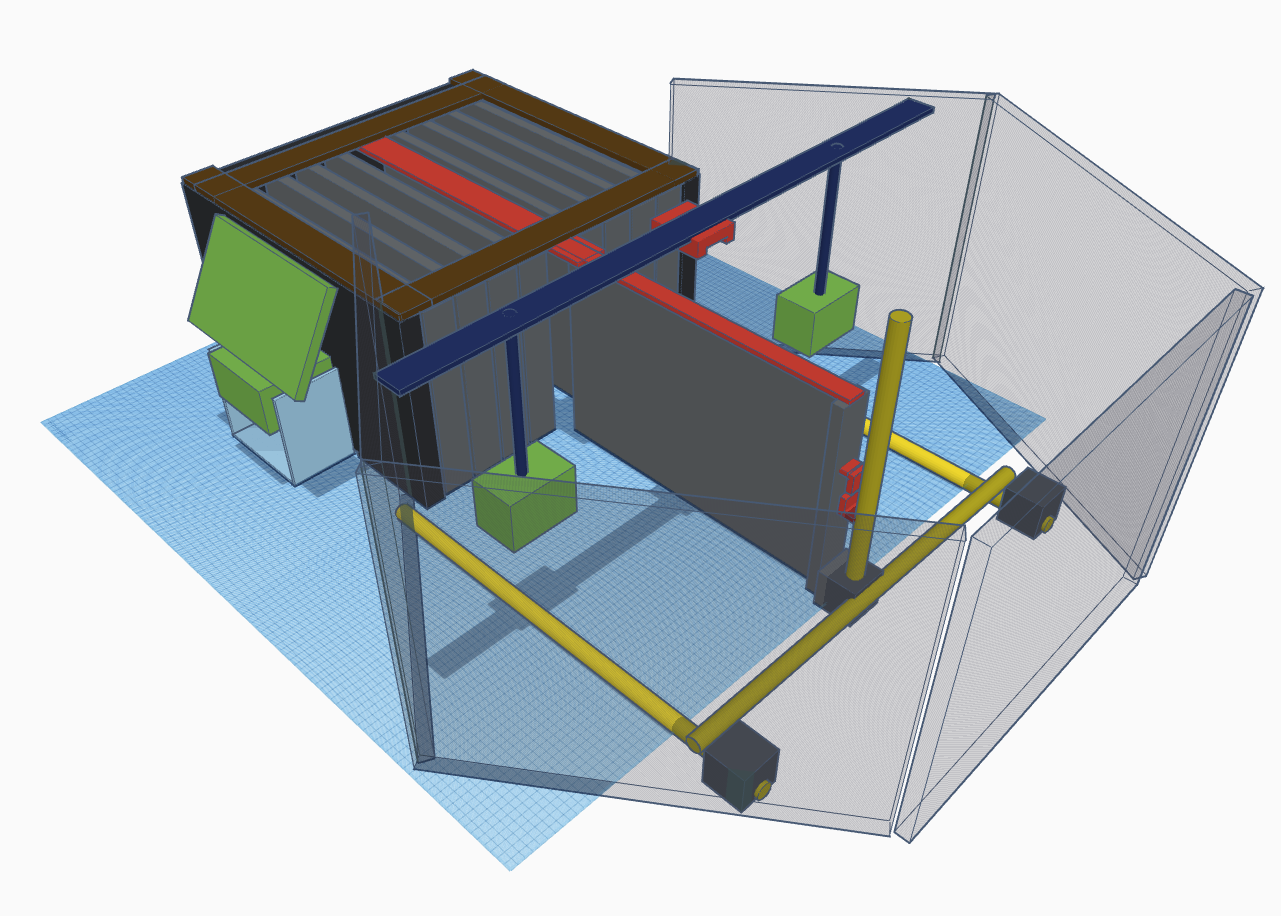
v2. Moving cameras on top, trying to simplify the focusing mechanism
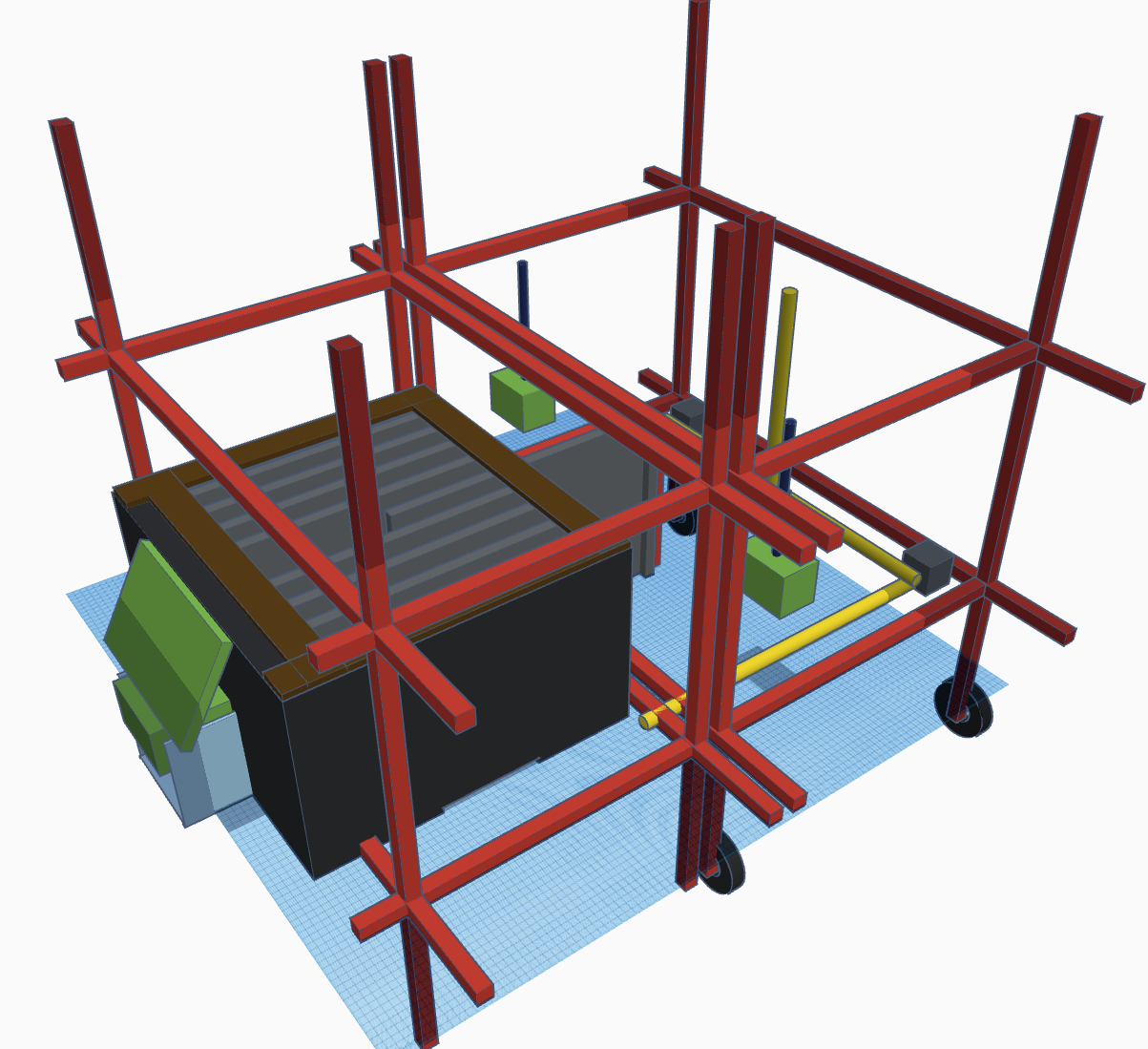
v3. added aluminium frames to have more modular structure. Moved entrance to have more symmetric hive as well as equal access to frames by beesv3. Cameras are fixed in position, now instead, frames are expected to be moved left or right out of original position to cameras focal point. This requires custom frame hook that should have it fixed in 3x planes
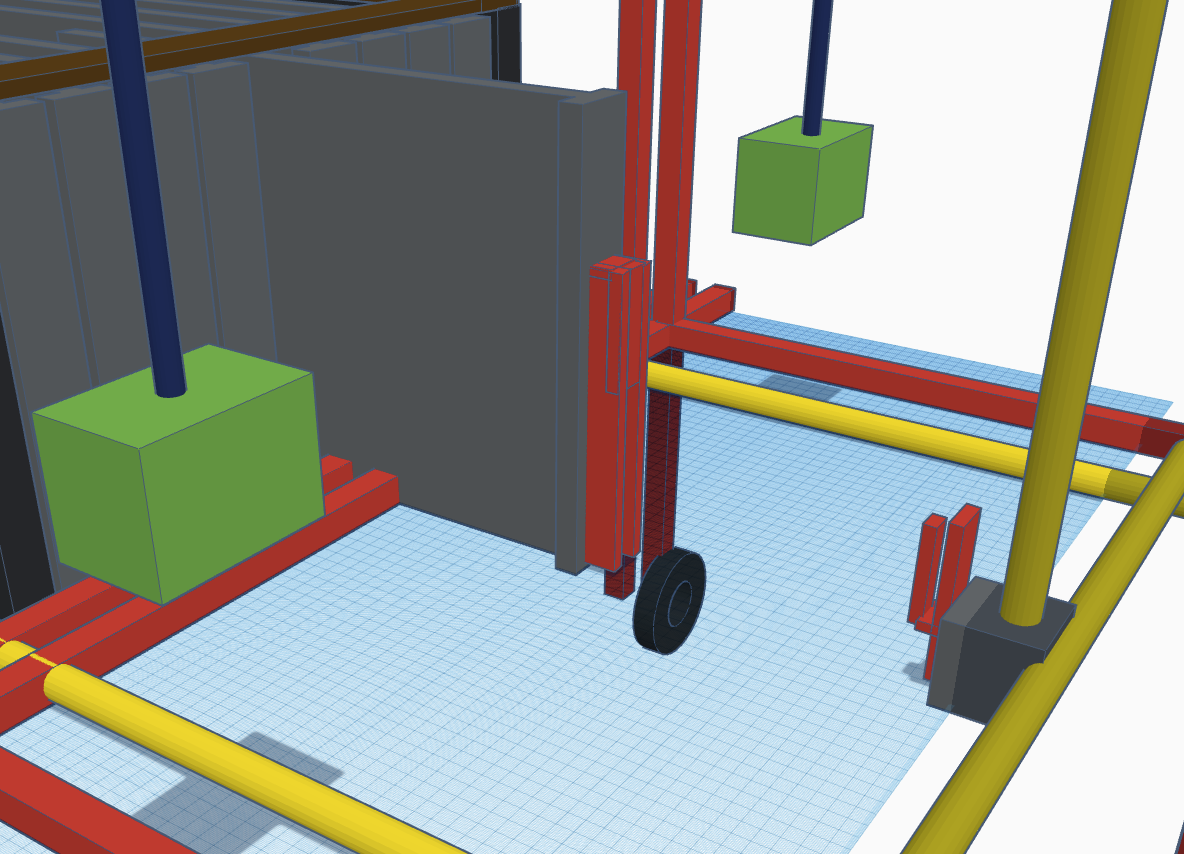
v4. Brought back dynamic camera and simplified vertical frame fixation. changed gantry to be vertical, added second hive section inspection ability
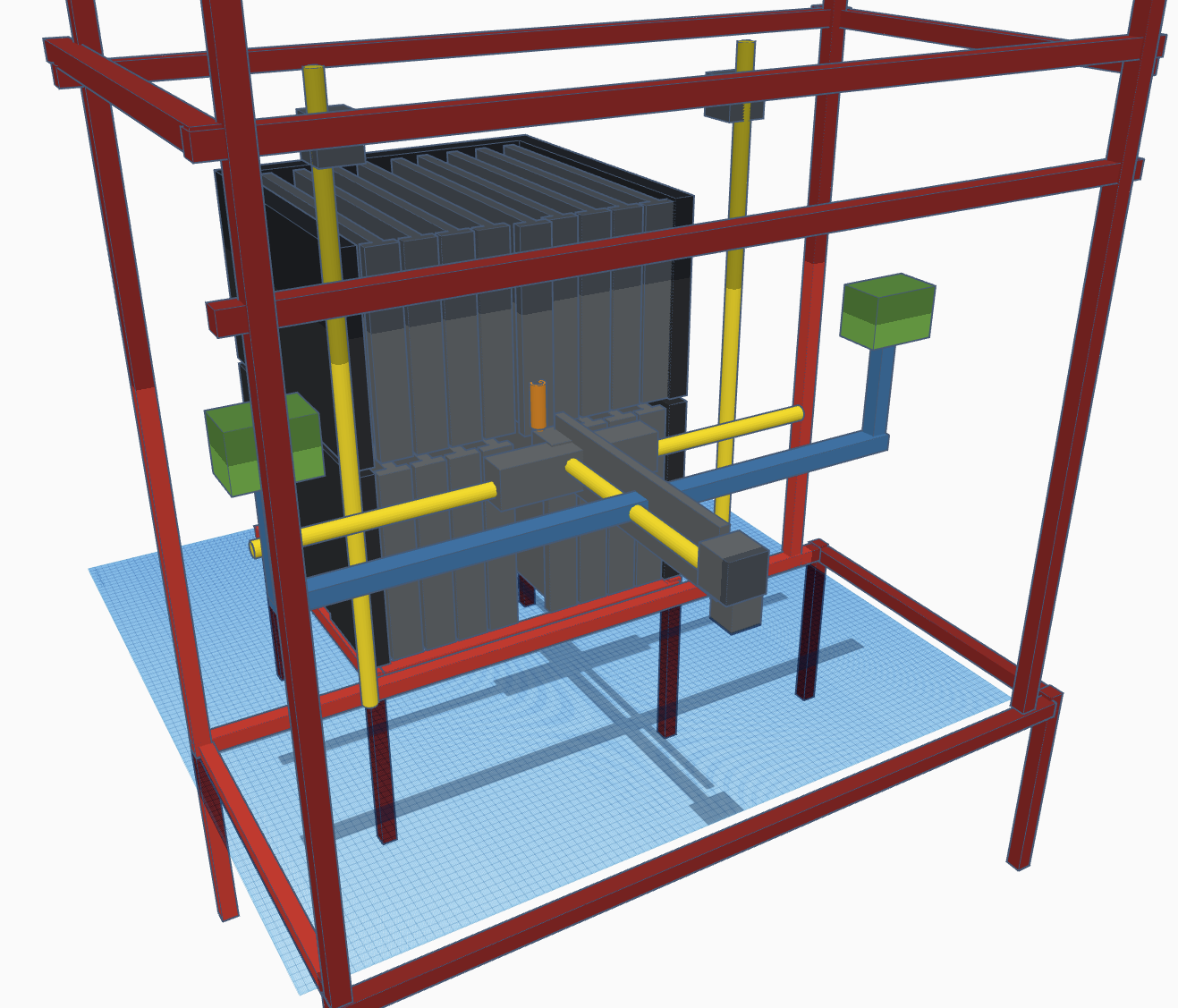
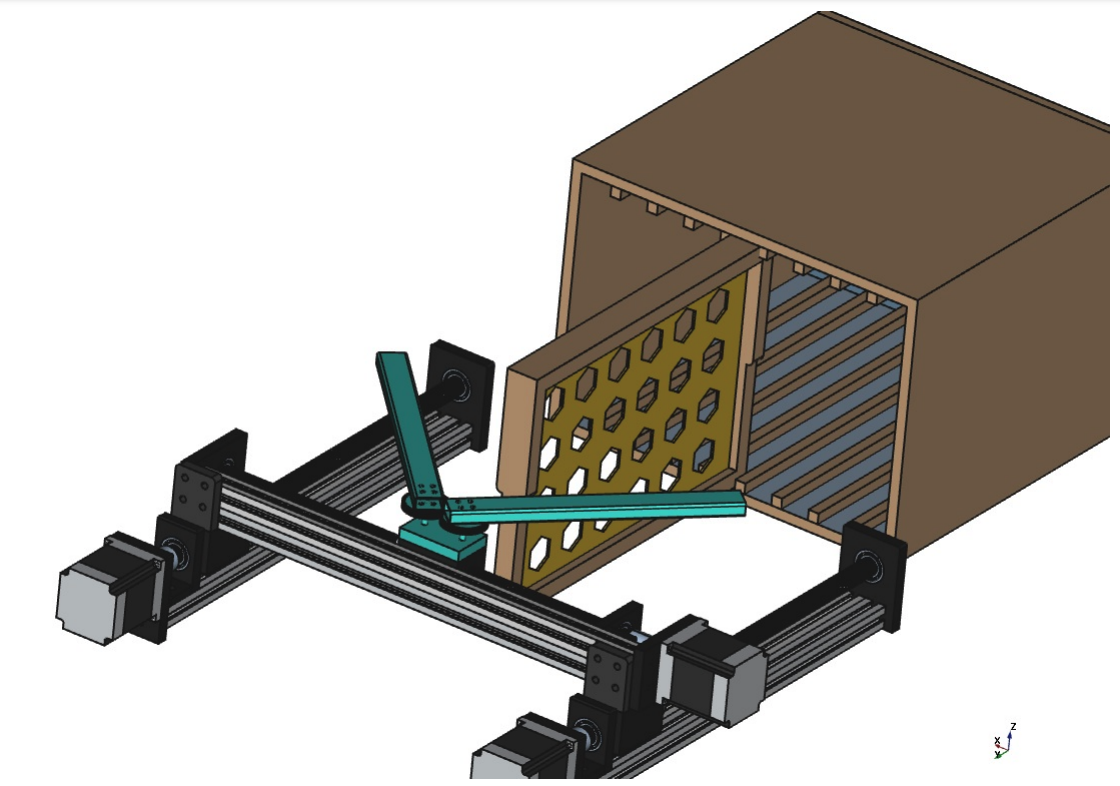
v5. Cameras are mounted on the butterfly mechanism. (designed by )
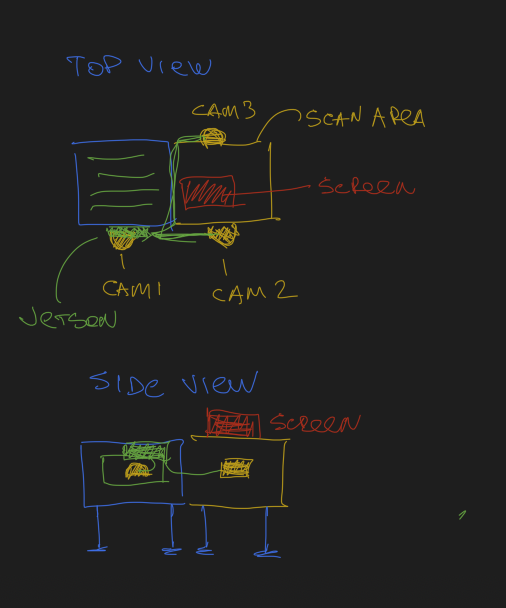
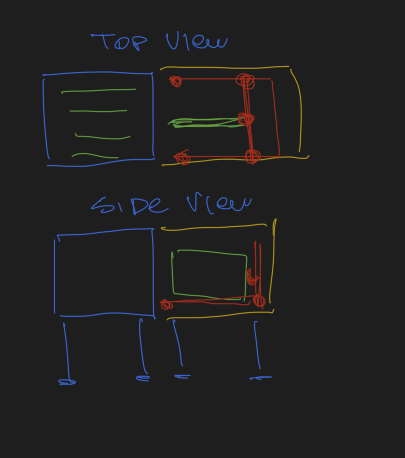
2D sketchImage, GPU systemMechanism to extract frames
AI sketch
Cabinet Hive type
We assume that beehive nest follows a cabinet style construction where frames can be moved out to the side



 Aleksei Zaitsev
Aleksei Zaitsev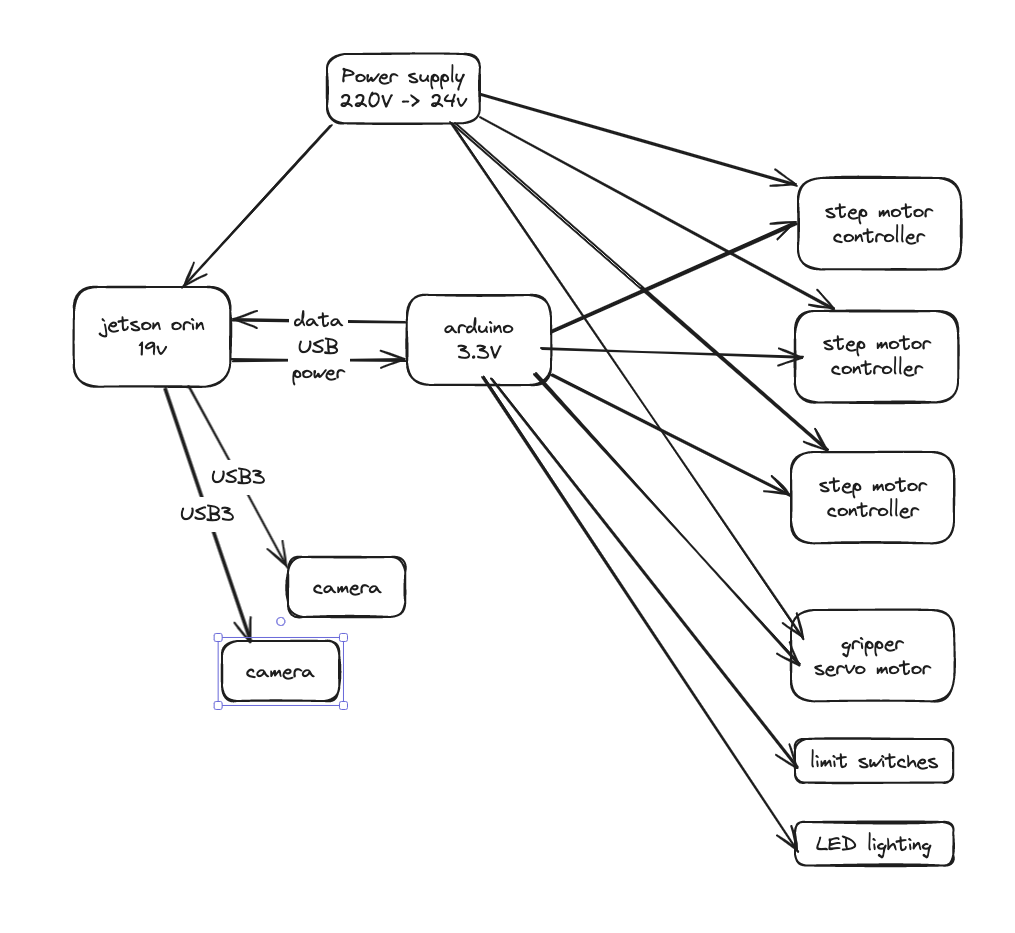
.jpg)